Robotic Arm
A custom robotic arm built to hold an optical sensor at precise angles during E Ink display testing.

During E Ink display development at work, I needed to measure optical properties of display films from many angles with high repeatability. I built a custom robotic arm to automate this process — holding a sensor at precise positions and cycling through a defined sequence of angles without manual repositioning.
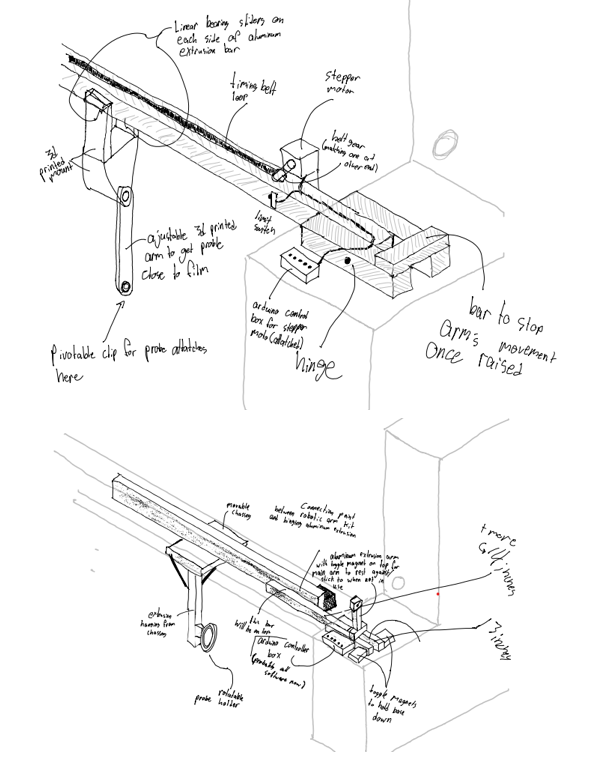
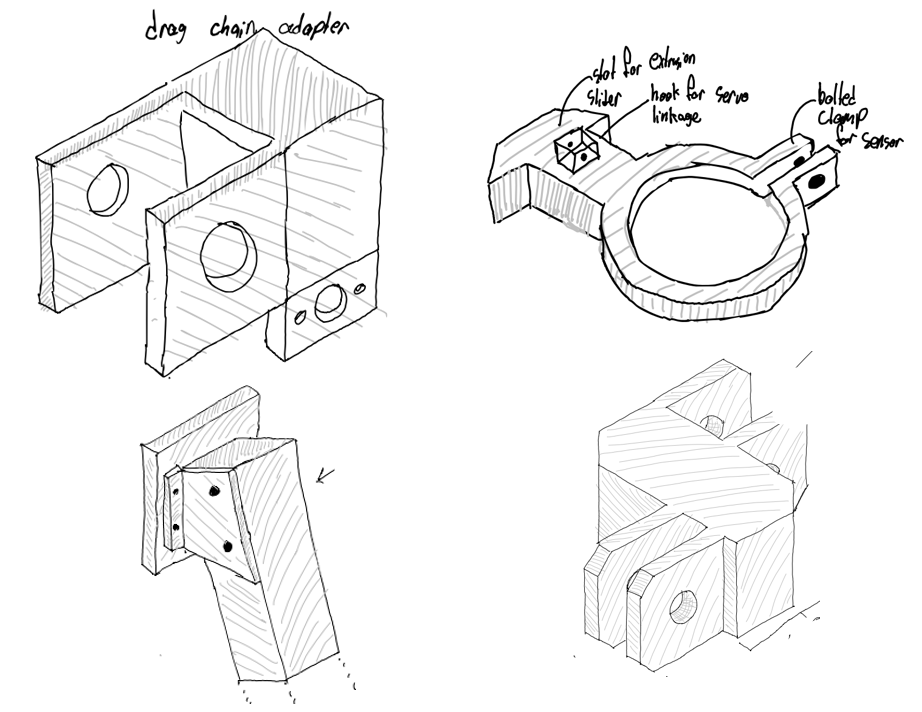
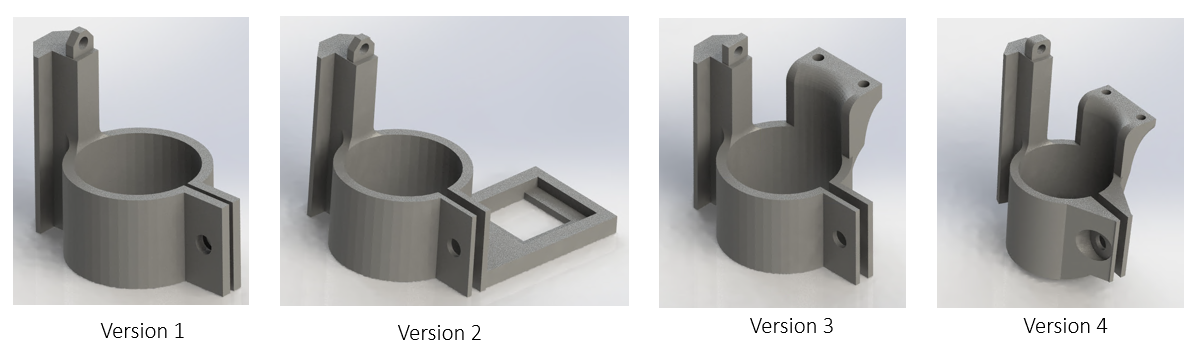
The arm was designed in SolidWorks and went through several prototyping iterations to achieve the required range of motion and rigidity. All structural parts were 3D printed, with machined components used where tighter tolerances were needed. The joint arrangement was determined by the angular range required to characterize the display samples.
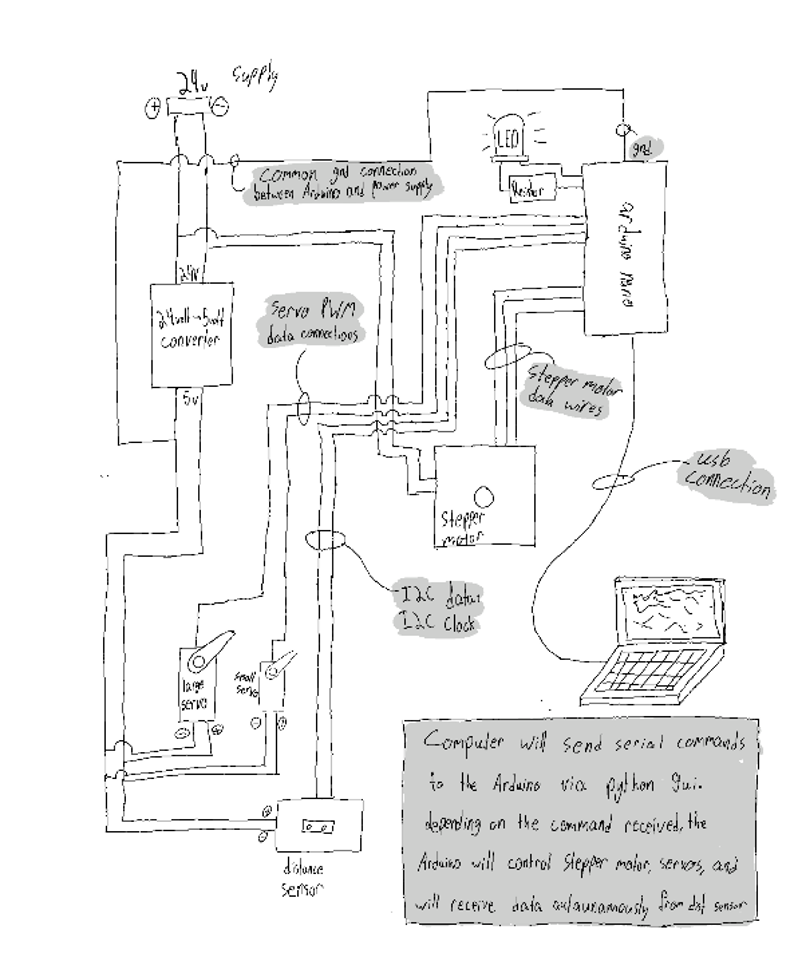
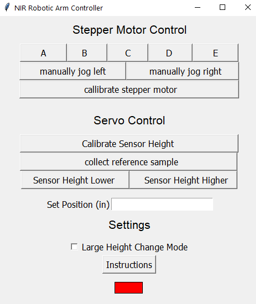
Servo motors drive each joint, controlled by an Arduino. A Python script on the host computer generates the movement sequences and communicates with the Arduino over serial. The wiring was routed through the arm structure to keep the assembly clean and avoid cable interference with motion.