Small Wall Printer
A printer that hangs on my living room wall and creates dots with a motor actuated pen to recreate an image.
This project is a proof of concept for my larger mural painting robot. It recreates images on a wall by marking individual pixels with a pen.
The system has two main parts:
- Base module: two stepper-motor-driven pulleys precisely control string lengths.
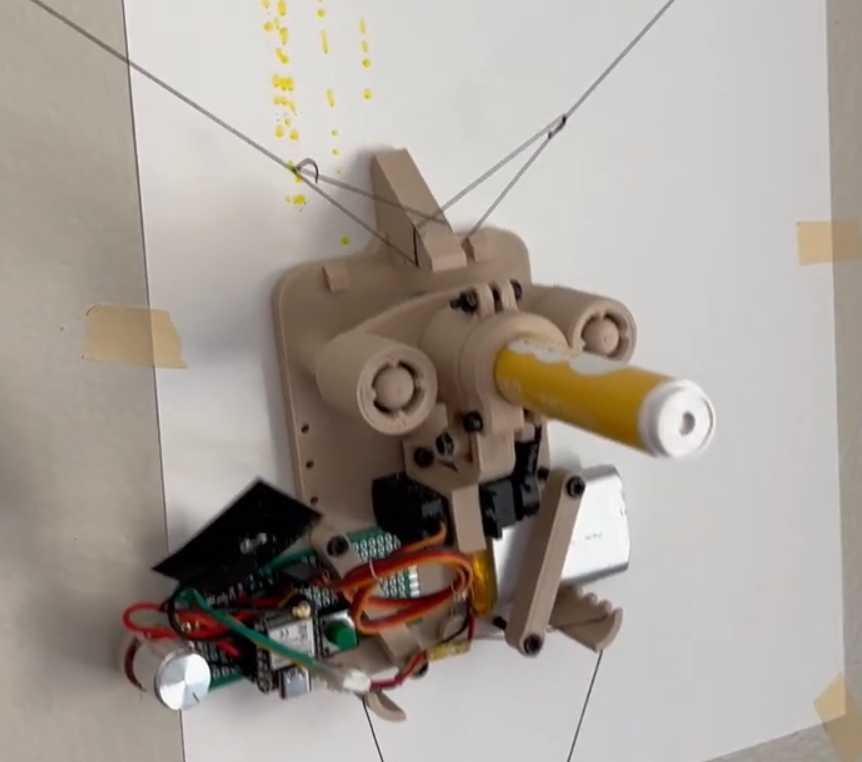
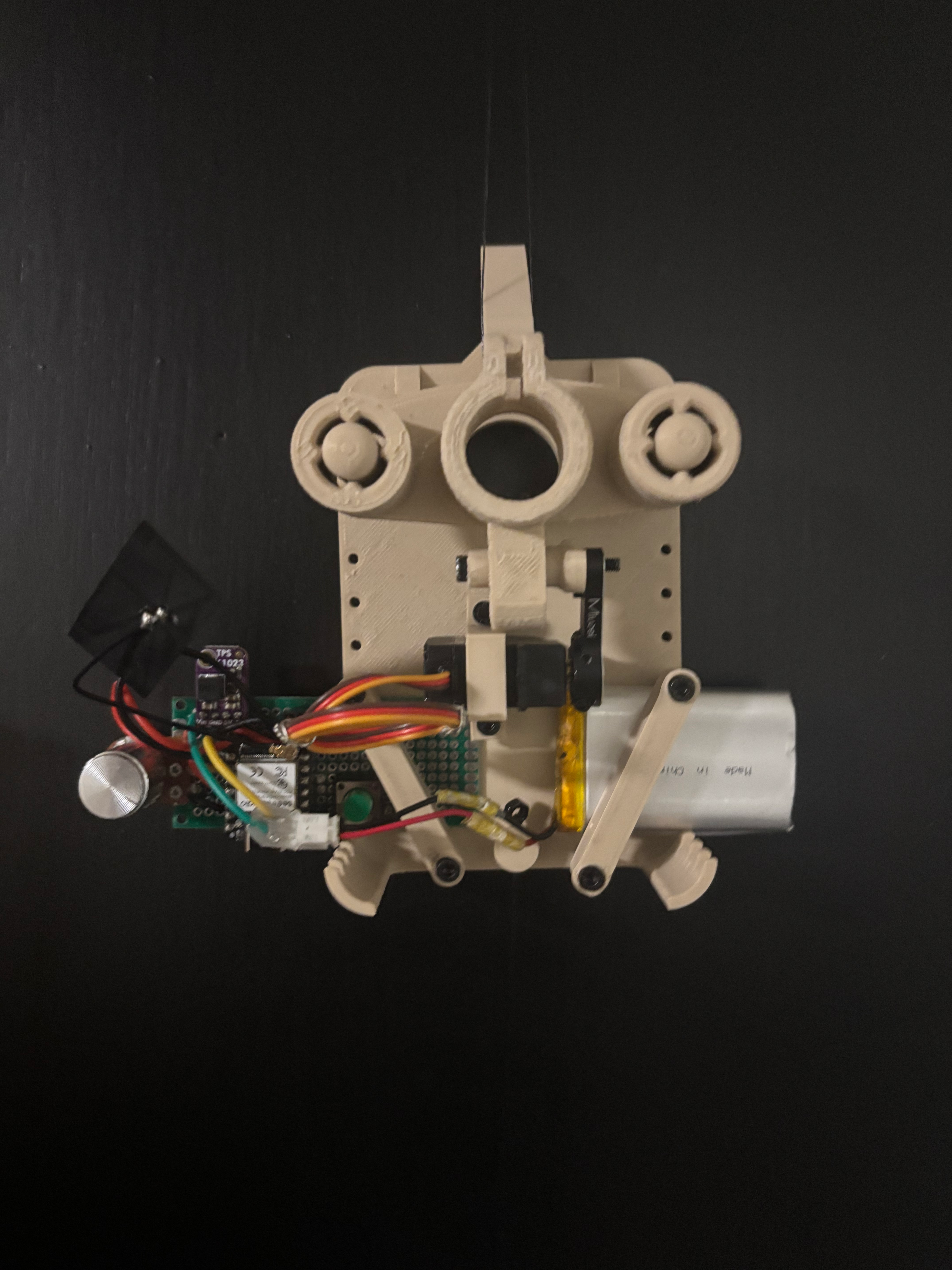
- Chassis: suspended from the strings and equipped with a marker actuator that responds to base-module commands.
The robot moves to each coordinate, places a dot, and repeats until the full image is complete. It uses ESP32 microcontrollers programmed in C++, with custom G-code–style commands generated by a Python script. Most components are 3D-printed.
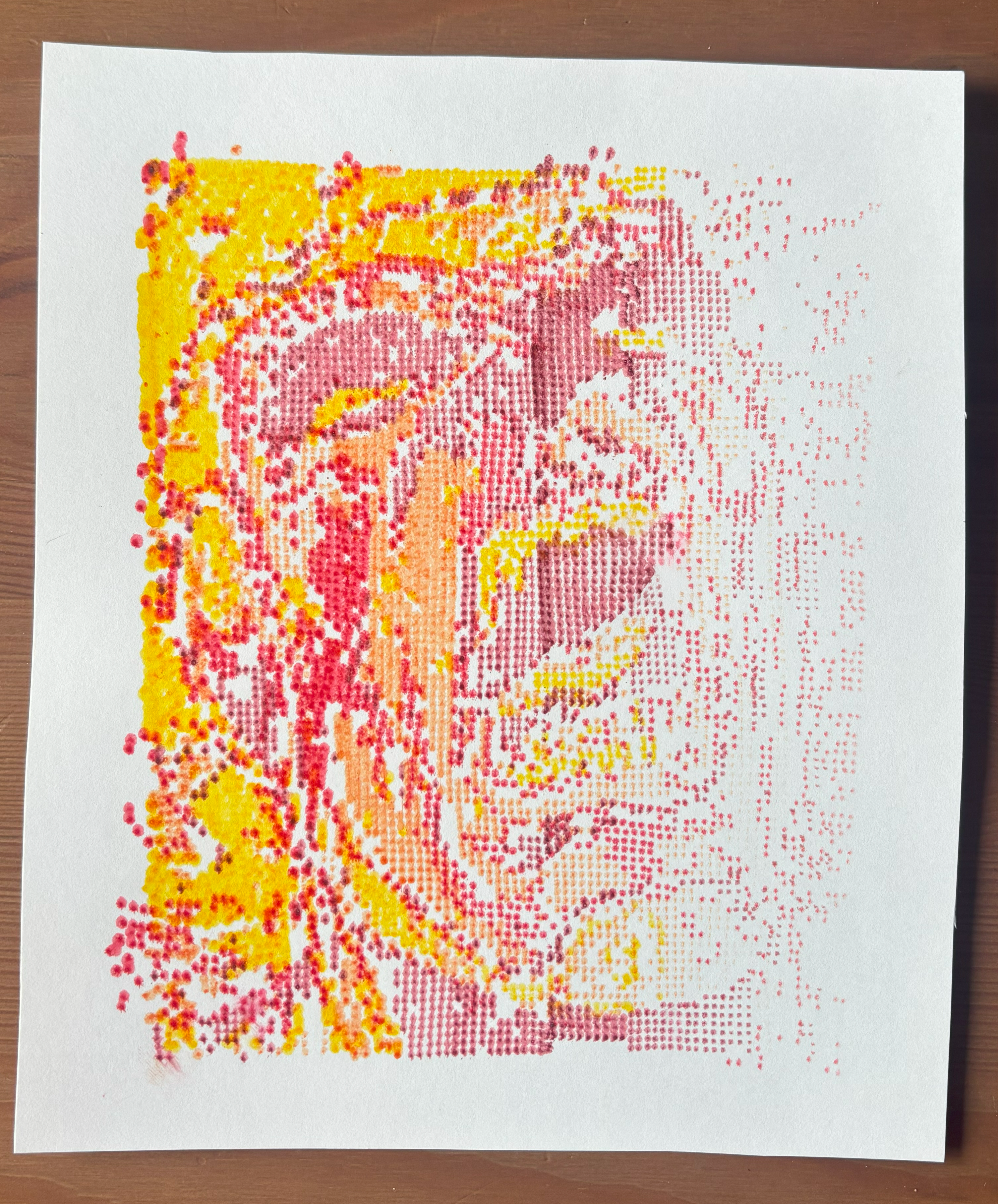
The printer successfully recreated single-color and multi-color images by placing individual dots. Each color pass requires a separate pen, with the chassis returning to a home position between passes.
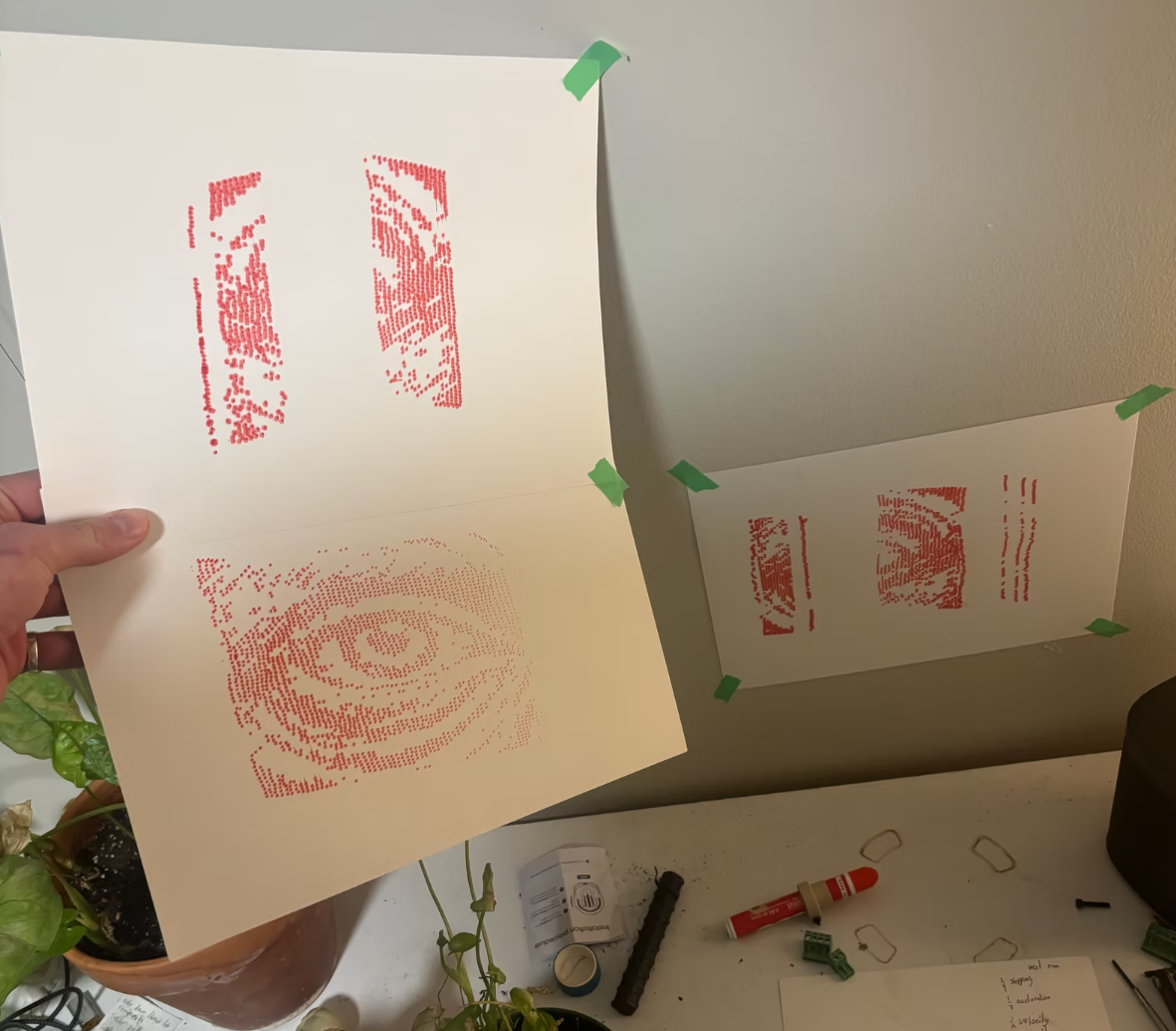

Multi-color printing uses multiple pen passes, one per color channel. The software generates separate coordinate paths for each color from the target image.
This project validated the core cable-driven positioning approach before scaling up to the full mural printer. Key lessons around kinematics tuning, ESP32 communication, and slicer accuracy were carried directly into the larger system.